光电系统新品,GCS-LIDAR 激光雷达参数测量及应用。
◆实验介绍: ◆知识点: ◆涉及课程: ◆实验内容: ◆实验原理及图示: ◆实验效果:
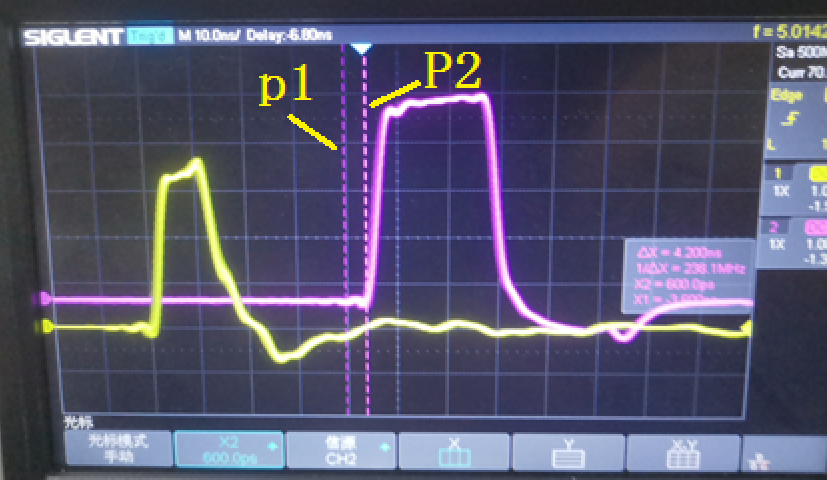
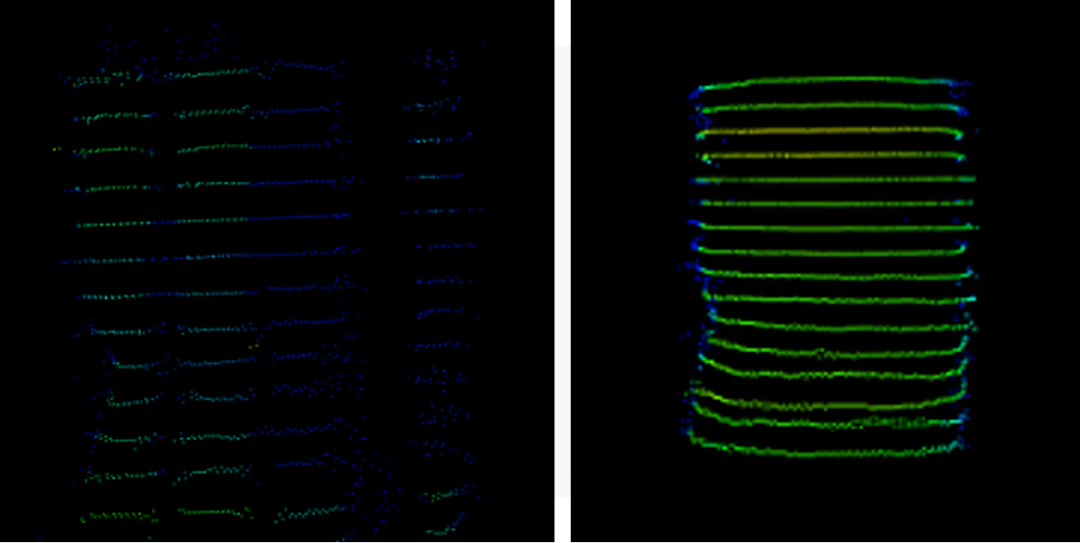
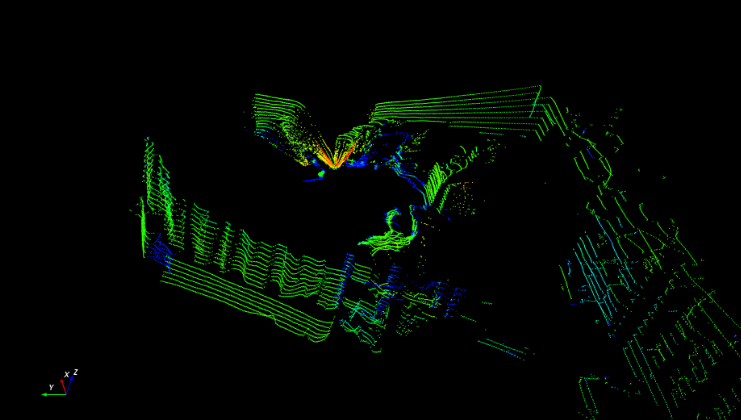
单点脉冲测距示意图 不同反射率(左)和相同反射率(右)样品扫描图 三维扫描点云图
◆技术指标: 脉冲测距激光器:工作波长905nm,光斑直径4mm,指示激光器650nm,激光器可以配套驱动源输出10ns-50ns脉冲激光; 脉冲探测器组件:探测器范围600-1100nm,上升沿2ns,放大电路,探测方波脉冲小于5ns; 脉冲驱动源组件:方波脉冲调节档位10ns、20ns、30ns、40ns和50ns,方波重频调节档位5K、10K、15K、20K和25K,白色电源箱,预留调制输出参考信号接口; 漫反射白屏组件:表面喷塑哑光设计,210*100mm,最小刻度1mm; 激光雷达组件:工作波长905nm,激光等级1级(人眼安全),激光通道16路,探测距离100m@70%,测距精度±1cm,垂直视场角±16度,水平360度,水平分辨率0.09度@5hz;以太网通信; 竖直移动台:高度调节300 mm,丝杠设计,移动过程自动锁紧,承重不小于5kg,预留转接板,可安装雷达及成像系统; 多孔固定板:底板450*300*12.7mm,表面25*25间距的M6螺纹孔; 图像传感器:黑白CMOS,工作波长450-950nm;靶面尺寸1/1.8″,分辨率1280*1024,灵敏度1.6v@550nm/Lux/s,像素5.2μm;软件包含测量和定标模块; 雷达测试板:不同反射率测试板,反射率2%-95%@905nm; 软件模块:软件包含雷达3D显示模块、数据采集模块,可以设置扫描角度和激光通道,预留一次回波和二次回波设置功能,数据存储等功能; ◆设备成套性: 激光光源、探测器组件、激光雷达组件、测试板组件、升降组件和成像组件 ◆选配清单: 光学清洁箱、实验挂图
区域:【冀、豫、晋、黑、吉、辽、陕、甘、宁】 负责人:牛佳:13511018987(微信电话同号) 联系邮箱:13511018987@163.com 区域:【京、鲁、云、贵、川、新、内蒙古】 负责人:王浩然:13811104659(微信电话同号) 联系邮箱:704725619@qq.com 区域:【苏、浙、沪、皖】 负责人:肖学刚:13436605508(微信电话同号) 联系邮箱:xiaoxuegang@cdhcorp.com.cn 区域:【津、桂、赣、湘、鄂及华南地区】 负责人:姜浩:13070157888 (微信:jianghao-DHC) 联系邮箱:jianghao6666@126.com